

新系统可运用磁铁感应外科手术机器人方位
更新时间:2020-5-29 14:47:42 浏览次数:2157现今市场上有各种样式的医疗机器人,能灵活运用的手术机器人设备则拥有非常广阔的应用前景,优势之一就是能在不造成损伤的情况下在身体脆弱部分进行移动。由于这些设备通常是由柔软的软质材料制成的,因此在使用传统的成像技术时并不总是能很好地显示出来。
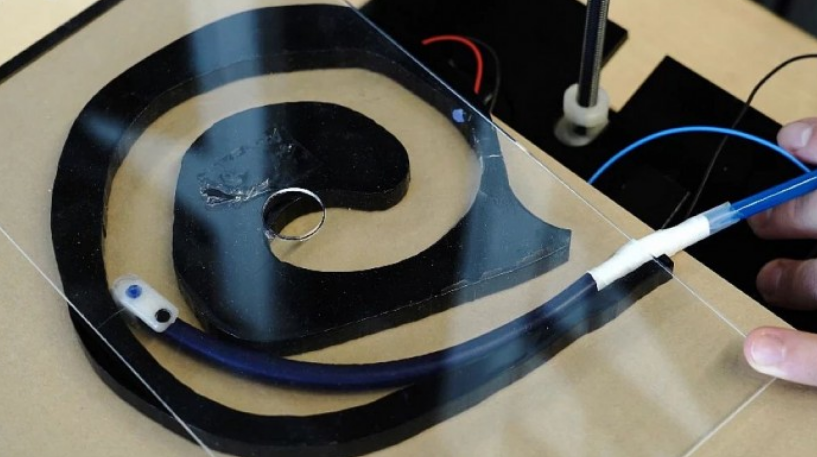
为了寻求更好的替代方法,加州大学圣地亚哥分校的科学团队创造了一个新系统。在该系统中,一个柔性机器人设备的前端装有一个磁铁,当该机器人在一个封闭的环境(最终会进入人体)中移动时,四个有间隔的外部传感器分别测量磁铁产生的磁场强度。
通过一个人工神经网络,系统会比较四个传感器的读数,利用这些数据来准确地确定机器人前端的位置。这与GPS利用多颗卫星,计算出用户的位置的方式类似。
到目前为止,该系统已经在一个基于实验室的模型中成功地进行了测试,使用的是一个尼龙管型的机器人装置,随着液体被泵入其中,它的长度会变长。据报道,整个装置,包括机器人、磁铁、传感器和其他电子装置,只需100美元左右。(来源:机器人在线)
Copyright 1998- 2016 © 上海坤地智能科技有限公司
All rights reserved.
All rights reserved.
