0
购物车
今日分享ABB机器人使用前的调试步骤,看下你都会了吗?
1、机器人与控制柜的安装到位
2.电缆连接(按照供应商给的安装手册,并且注意控制柜的供电数据)
3.接入主电源、检查主电源并且上电
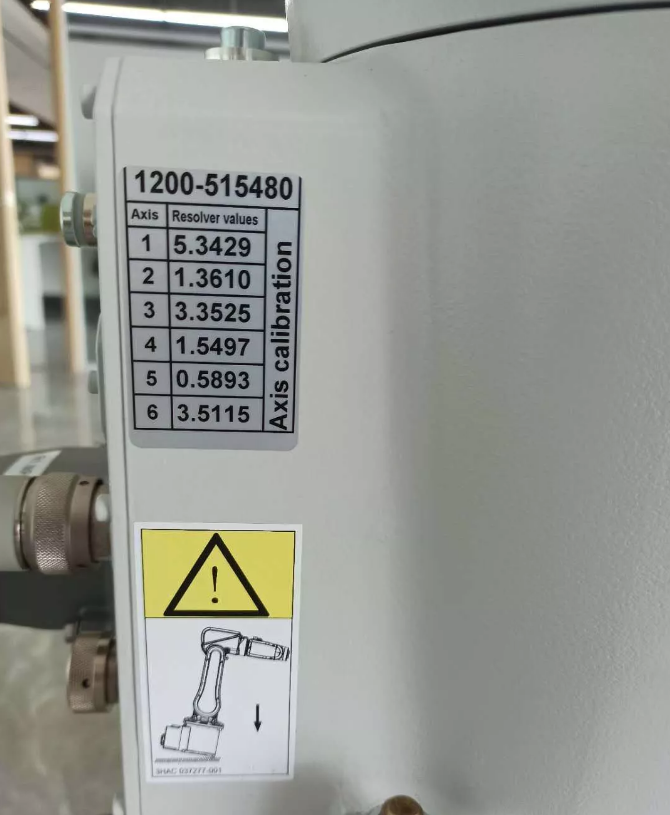
4.在上电完后,首先要进行机械轴的校准与转数计数器的更新!(根据:校准参数进行设置)
A.校准前,必须手动将机器人六个轴回到原点(机械刻度处)
B.查找到轴校准的数据
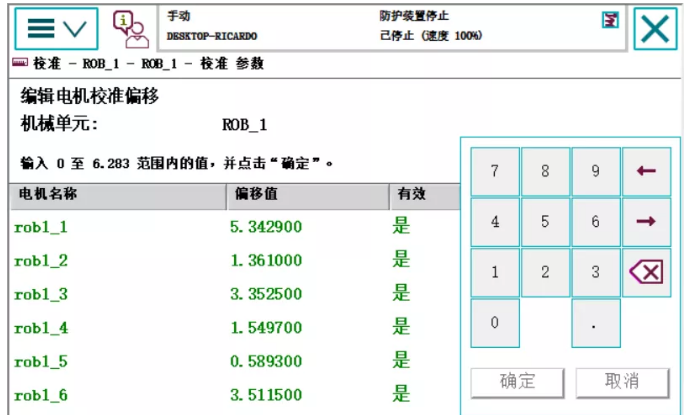
C.在示教器中的控制面板=>校准=>校准参数 中进行输入校准数据
D.更新完校准参数后,还需要更新转数计数器
5.查看对应的机器人手册,配制好IO设定
6.安装好工具和周边设备
三个重要数据:
确认工具的TCP点(tool0为机器人手腕处的预定义坐标系,在确定好TCP点之后,使用重定位手动操作时候,机器人的动作会围绕着TCP进行运动)(或者直接跟工具的厂家要工具的数据)
其中有几种测量TCP点的方法:(前三个点的姿态相差尽量大些,有利于TCP精度的提高)
1、4点法,不改变tool0的坐标方向
2、5点法,改变tool0的z方向
3、6点法,改变tool0的x和z方向
确认工具的重心和载荷数据,可以调用例行程序中的loadIdentify来进行检测(准确率在90%以上才可以使用该次的数据,否则需要重新调用)
确认工件坐标系
三点法定义(确认x1,x2,y1三点)
7.进行编程,RAPID程序
8.调试完程序后,自动运行(切换到自动模式后,按下电机 上电/复位 按钮)(来源:上海ABB工程有限公司)




 帮助中心
帮助中心 会员中心
会员中心 在线客服
在线客服